Senior Software Engineer (Maps and Navigation) @ Lucid Motors
Contributed to Lucid’s DreamDrive advanced driver-assistance system(ADAS) for Lucid Air Sedan and Gravity SUV.
Led development of HD map software on Nvidia Xavier and Orin with QNX, integrating GNSS sensor data with TomTom APIs.
Delivered ADAS features - Lane Change Assist (LCA), Adaptive Curve Speed Control (ACS), and Hands‑Free Highway Assist (HF-HWA) - through cross-functional collaboration with platform, perception, motion planning, cloud, and field testing teams.
Enhanced system stability and runtime reliability through memory, CPU, and bandwidth profiling, improving offline performance and reducing error rates.
Created interactive visualization and debugging tools with Folium, Plotly, and QGIS, enhancing map data analysis and accelerating issue resolution for ADAS development.
Developing intelligent, automated solutions for manufacturing, warehouse, and distribution environments, sold by KION Group and its operating units Dematic, STILL and Linde.
Directly involved with developing on-vehicle Simultaneous Localization and Mapping (SLAM) software for AGVs and AMRs. Also contributing to automated driving algorithms for collaborative AGVs performing order picking.
Improved accuracy and robustness of the reflector extraction algorithm leading to sub-centimeter accuracy.
Developed a Gazebo-based virtual testing pipeline to improve line extraction algorithm using hyperparameter tuning.
Improved speed of feature-based association algorithm by 50%, leading to a 30% faster localization pipeline. Analyzed real-time CPU utilization of SLAM processes and threads using Valgrind, LTTng, and perf.
Standardized the pallet pick/drop testing at physical warehouses. The accuracy-repeatability analysis was done using an external laser tracking system by Faro. Also, a procedure to calibrate lidar, steering encoder, and traction encoder was created.
Developed a python-based tool to visualize recorded SLAM logs, and automated their offline performance analysis.
Evaluated the use of Visual Inertial Odometry and GraphSLAM to improve AGV navigation in warehouse environments.
Localization, Mapping, and Path Planning for Autonomous Vehicles in Factories (repo)
Simulated Automated Guided vehicles (AGVs) and Autonomous Mobile Robots (AMRs) in a warehouse environment.
Mapped a virtual environment, by manually moving an AGV and creating an occupancy grid map. The AGV only had a 2D lidar sensor on it. Localized an AMR using the same map while controlling it manually or autonomously using path planning. Simulated a complete pick and drop operation. ROS packages like gmapping, AMCL, and move_base were used.
Used SLAM to manually move an AMR through a virtual environment and create a loop-closed 3D graph map using RTAB-Map. The AMR used a 3D camera and a 2D lidar sensor to create the map for localization.
Programmed an AMR to autonomously follow a moving reflective ball target using a 2D camera.
A PID controller is implemented to maneuver a vehicle around a virtual track using steering, throttle, and brake.
System Integration
Robot Operation System (ROS) is used to robustly combine Perception, Planning, and Control.
Research Assistant @ CAD Innovation and Engineering Lab
Robotics
Developed SnappyXO, a laser-cut design-driven robotics platform that enables designing mechanisms, structures, and robots. It has successfully raised $16K+ on Indiegogo for a crowdfunding campaign.
Organized workshop “Designing, Prototyping and Programming Robot Motions using MotionGen and SnappyXO” at IDETC 2018 and “Kinematic Summer School” at IDETC 2019.
Mentored multiple teams, as part of the Vertically Integrated Projects (VIP) program, for Robotics-driven Engineering Design Exploration. Some of the projects were Walking Robots, Self-driving Car, Sumo/Battle Bot, Biomimetic Robots, Drones, and Bots with Arduino alternative microcontrollers.
Assisted in developing and improving Rehabilitation Robots for sit-to-stand assist and gait correction.
Collaborated with ROAR lab at Columbia University on the design of spatial robots for neck rehabilitation.
Developing a Computational Framework for Data-Driven Mechanism Design Innovation supported by $450K NSF grant.
Created MotionGen, a web-based mechanism design framework. Try it out here.
It uses MEAN (MongoDB, Express.js, Angular.js, Node.js) stack to create a RESTful web service based on MVC architecture.
Both iOS and Android apps have been created using Apache Cordova framework.
Research and Algorithms
Path synthesis of mechanisms based on Fourier descriptor fitting using Nelder-Mead and Simulated Annealing optimization.
Mixed motion and path mechanism synthesis using optimal non-uniform DFT and Singular Value Decomposition.
Real-time simulation of planar, spherical, and spatial mechanisms with prismatic and revolute joints using Newton-Raphson optimization.
Developed unified planar, spherical, and spatial mechanisms synthesis techniques using Homotopy continuation method for simultaneous type and dimensional synthesis.
Developing machine learning based techniques for path synthesis using spatial platform linkages.
Product Design @ Vivonics, Inc.
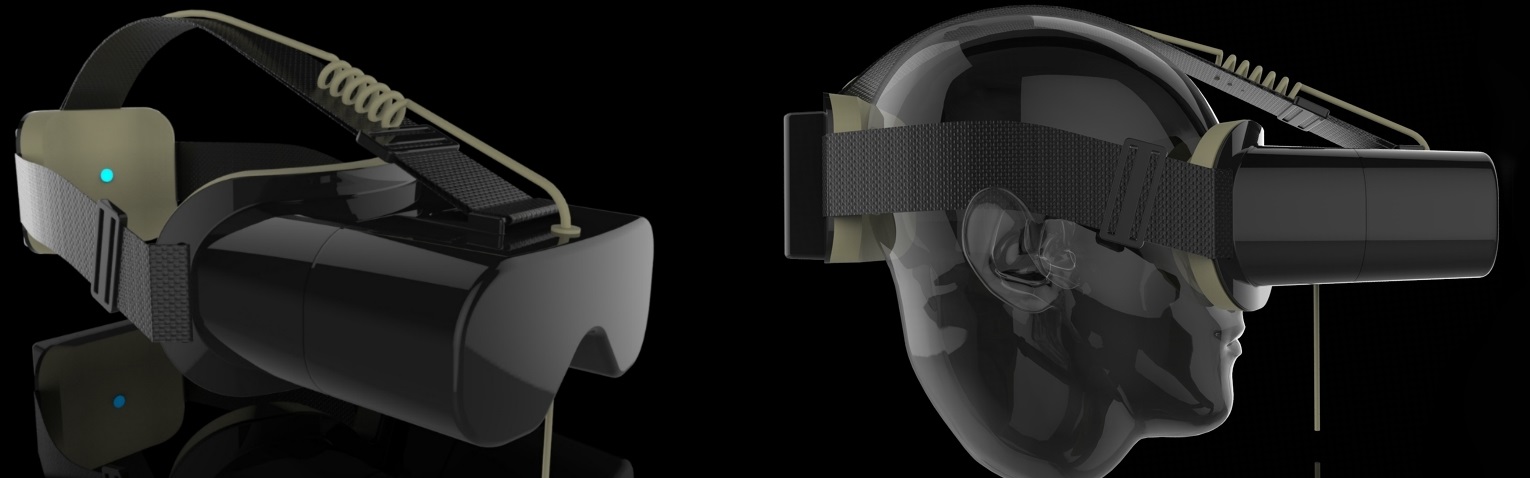
Coordinated with the design team on developing PMT Monitor, a portable medical headset that detects head trauma.
Generated concepts for a mechanism that adjusts the interpupillary distance between the lenses focusing on manufacturability and robustness.
Design and Manufacturing @ Leviathan Energy
Designed and manufactured a Hydro-kinetic turbine with an improved airfoil design that produces 50% more power in collaboration with Leviathan Energy.
Created engineering models using Solidworks and Autodesk Inventor and fabricated parts by FDM based 3D printing.
Research Fellow @ IIIT Jabalpur
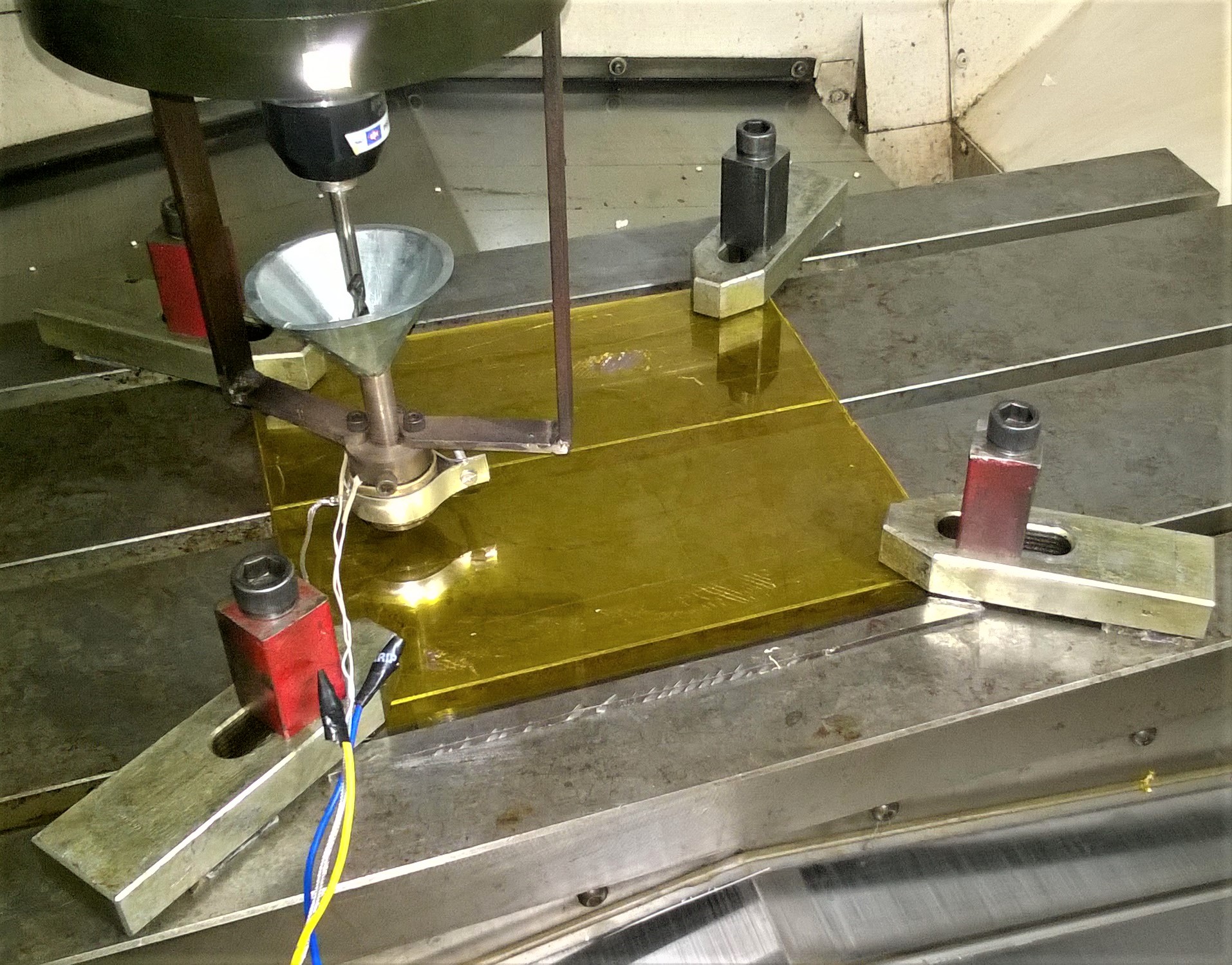
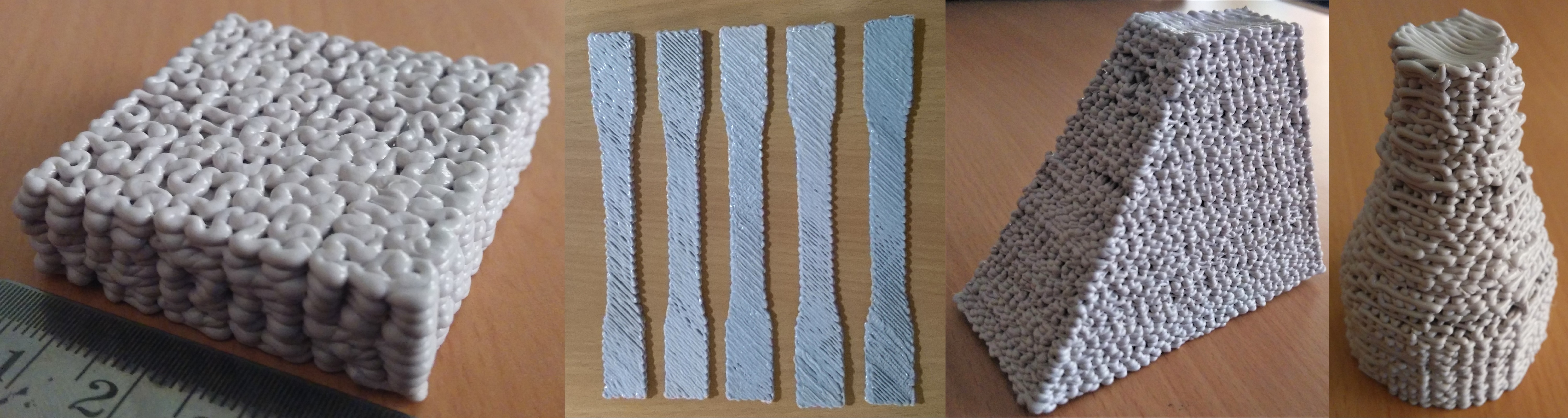
Led a $70k+ research project funded by the Science and Engineering Research Board titled “Development of Additive-Subtractive Integrated Rapid Prototyping System for Improved Part Quality”.
Spearheaded design and manufacturing teams to create a new hybrid 3D printing process using Pellet based Screw Extruder with CNC machines. Created Toolpath Planning strategies to manufacture CAD models using Hybrid Manufacturing techniques.
Design @ Sara Sae
Involved with product development of Hydraulic Tongs used in the oil and gas industry.
Carried out Kinematic and Dynamic analysis to find the most probable failure regions.